-

重庆市亿盟创联智能设备有限公司
主营:管道检测机器人,工业内窥镜,管道修复气囊

重庆市亿盟创联智能设备有限公司
主营:管道检测机器人,工业内窥镜,管道修复气囊 5
5
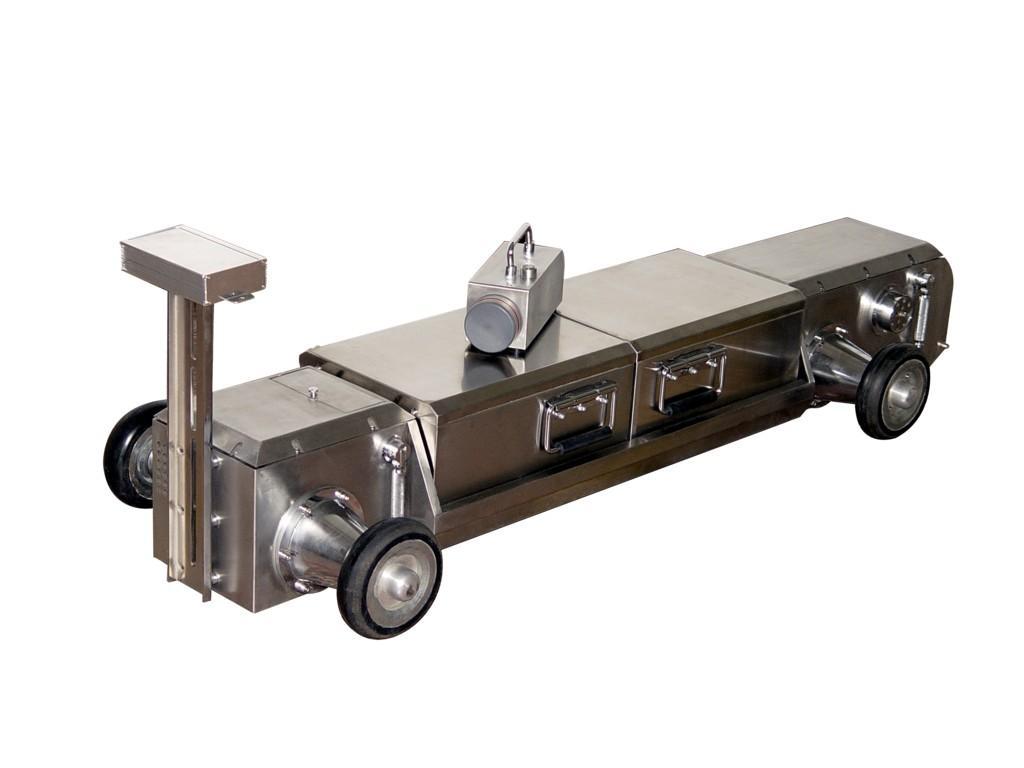
对于轮式管道机器人,的运动学模型是实现运动控制的基础。对单个轮子、轮式移动机器人在管道曲面上的运动学特性及控制理论方面分析很少,需要建立一套关于轮式管道机器人运动学的理论。
管道机器人按其外型大小可分为大型、普通和微型三种,其中微型管道机器人又可按其电驱动技术种类划分为基于正弦波动驱动的微型管道机器人、基于电磁驱动的管道鱼鳍机器人、直流电机驱动的蛇行机器人、压电元件驱动的微型管道机器人、GMA驱动的微型管道机器人、SMA驱动的蚯蚓蠕动管道机器人。
管道的重要性不言而喻,作为一种有效的物料输送手段而广泛应用在城市雨污水、天然气输送、工业物料运输、给排水和建筑物等通风系统等领域里。为了提高管道的寿命、防止泄漏等事故的发生,**管道的正常运作,就必须对管道进行有效的检测维护等,而管道检测机器人作为快捷安全的一种检测方式,越来越多地被应用在管道检测方面。
轮式移动机器人的控制输入通常为驱动轮的转速和舵轮的方向角。在某一时刻,机器人的位姿坐标作为状态变量已知,广对于驱动轮,可以根据前面单个轮子在圆管中的运动学特性分析结果求解出轮心的瞬时速度大不和方向户对于与壁面接触的被动轮,可求解出轮心瞬时速度的方向。
根据两个轮心的速度可求解出轮式移动机器人做瞬时螺旋的螺旋运动参数,根据此螺旋运动的角速度向量可推导出欧拉角的变化率以及机器人坐标系原点的速度向量,进而可推导出机器人的控制输入与位姿坐标变化的关系,即圆管中轮式移动机器人的运动学模型。
重庆市亿盟创联智能设备有限公司位于重庆高新区,是一家从事集研发、生产、销售及技术服务于一体**智能产品生产企业,并在全国主要城市设有销售和服务中心,其团队骨干由具有多年行业经验的人员组成,产品技术和质量获得行业机构多项认证。
http://yimchl.b2b168.com
欢迎来到重庆市亿盟创联智能设备有限公司网站, 具体地址是重庆市渝北区花卉园西一路六号 ,联系人是彭先生。
主要经营仪器仪表相关产品。
单位注册资金未知。
我们公司主要供应管道检测机器人,工业内窥镜,管道修复气囊等产品,我们的产品货真价实,性能可靠,欢迎电话咨询!